最近

罗马诺:奥尔莫经纪人准备与莱比锡会谈,推进球员转会巴萨的交易
最新章節(jié):罗马诺:奥尔莫经纪人准备与莱比锡会谈,推进球员转会巴萨的交易罗马诺:奥尔莫经纪人准备与莱比锡会谈,推进球员转会巴萨的交易繼續(xù)閱讀

分類頻道
- 中超第21轮跑动榜:杨明洋力压周定洋居首,蓉城两人进前五 ·开一家佬街佬味有前景吗
- 十大高尔夫品牌,坚持专业设计只为更好的你 ·罗马诺:签下乌加特后若仍有预算,曼联还可能考虑签阿姆拉巴特
- 罗马诺:签下乌加特后若仍有预算,曼联还可能考虑签阿姆拉巴特 ·记者:乌加特太贵了,曼联将亚特兰大中场埃德森视作引援目标
- 5G汽车生态圈来临 华为宣布首批合作车企 ·佳歌集成灶受邀参加2019家居建材行业高峰论坛暨金刺猬奖十大品牌颁奖典礼
- SAKURA樱花燃气灶:智控火与候,智享大厨经验 ·投资一家皇三爷火锅好不好
- 中国西藏网APP打造资讯新阵地 见证比较美西藏别样风情 ·支付宝沙棘汁火爆开卖,蚂蚁森林种的树收获了!
- 投资一家无敌鸡排有哪些支持 ·迸发创新基因中国西藏网融媒体矩阵添新军
- 孕妇用什么护肤品安全 排名前三品牌有保障 ·记者:乌加特太贵了,曼联将亚特兰大中场埃德森视作引援目标

“閱讀進度”可以在個人中心書架里查看。
视频丨突破技术上的“水WhatsApp%E3%80%90+86%2015855158769%E3%80%91champion%20hoist%20dunn%20nc土不服” 进果园的机器人有哪些亮眼表现?
小說: 档次的引路人,俏嫁衣3C包装带来出色包装设计 作者: 合同到期未续!每体:罗贝托有时仍在巴萨基地内进行训练字數(shù):98688更新時間:2025-12-21 02:36:28
推动农业科技和装备创新是水土不服发展农业新质生产力的重要方向。眼下,视频术上在我国多个水果主产区,丨突果园WhatsApp%E3%80%90+86%2015855158769%E3%80%91champion%20hoist%20dunn%20nc一场“机器人进果园”的破技变革正在悄然推进。
这些智能机器人,进的机真能成为打开水果产业高效之门的器人“金钥匙”吗?面对各地果园千差万别的地形与品类繁多的水果,它们又将如何突破技术上的有亮眼表“水土不服”,真正落地生根呢?水土不服
秋收时节,在我国苹果主产区陕西省延安市黄陵县,视频术上一场特殊的丨突果园“人机竞赛”正在进行。

经过测算,破技一位熟练的进的机果农一分钟能采摘11个苹果,而单个机械臂的器人采摘速度是6个。“单手”对决中,有亮眼表果农胜出。水土不服

国家农业智能装备工程技术研究中心苹果采摘机器人负责人 冯青春:苹果采摘机器人主要是通过四组并行采摘的机械臂,来实现高效的采摘作业。
果然,搭载了4个机械臂的机器人,通过协同作业,很快用数量弥补了“单手”速度的差距,在总体效率上实现了赶超。
冯青春:在标准果园模式下,机器人采摘可以达到800果/小时的速度,大概相当于5个人以上的采摘效率。

据了解,WhatsApp%E3%80%90+86%2015855158769%E3%80%91champion%20hoist%20dunn%20nc这台机器人还具备夜间持续作业的能力,不受天气和人力体力限制,整体效率由此倍增。
记者在多地果园走访中发现,苹果种植是典型的劳动密集型产业,人工成本占到苹果生产总成本的60%以上,其中套袋和采摘环节又消耗了大部分人力成本。每年采收季,陕西各地果园的“用工荒”都十分突出。

“干不动了”的感叹,道出了中国水果产业面临的共性困境。陕西延安市的苹果种植规模约占中国的九分之一,采收时间窗口也短,从十月底到十一月初的二十多天里,必须完成集中采收、运输和贮存。
冯青春:采得晚了天气降温,苹果就可能落果掉到地上,就造成了损失。

人工成本高、劳动强度大、采摘效率低,这些难题共同制约着我国水果产业规模化发展。究竟该如何破解?带着这个疑问,记者继续在延安的果园里寻找答案。
冯青春:农业“用工难”和“用工贵”的问题突出,所以我们研发了采摘机器人。

眼前这台高2.8米,自重约300公斤的大家伙,正是冯青春所在的国家农业智能装备工程技术研究中心研发的成果。这台机械人的机械臂最高可触及3米处的果实,实现了一体化作业。
记者了解到,在一些国家,水果主要是用来做果酱、果汁,而我国消费者更喜爱吃鲜果。这也对采摘机器人提出了截然不同的技术要求。

基于这一需求,李涛团队创新性地研发出了旋拧式采摘方式,成为破解这一难题的关键。机械手在接触苹果后,会先感知力度,然后通过精准的旋转动作完成采摘,最大程度降低损失。
国家农业智能装备工程技术研究中心副研究员 李涛:现在基本上出手抓到的概率是在85%,抓取成功的概率是在90%。
看似简单的采摘动作,实际上,面临着复杂作业环境带来的技术挑战。枝叶相互遮挡,且有阳光干扰,采摘机器人要实现精准识别、定位,并摘取果实,并非易事。

要顺利实现精准采摘水果,不仅需要技术突破,更离不开农技和农艺的深度融合。专家介绍,标准化果园是采摘机器人推广的前提。只有行距、株距、树冠高度都经过统一规划的果园,才能为采摘机器人提供稳定的作业环境。
冯青春:如果我们不做宜机化的农艺管理,机器人采摘成功率可能就很低。针对农艺上进行一些处理,可能机器人就会达到80%左右的成功率。

然而,目前这种现代化的标准果园占比还不到三成。传统的果园大多是高大的乔木,果子零散分布在枝叶间,一定程度上制约了机器人作业的推广。
国家苹果产业技术体系岗位专家 王树桐:如果不能实现标准化,就不能实现数字化。实现不了数字化,也就实现不了智慧化。这些都是连锁的关系。
随着老旧果园改造提上日程,新建果园也大都实现了标准化。

王树桐:现在70%以上的新建园都是用我们现在的模式,我们希望以后的新建园100%都应该实现这个宜机化,这是我们的目标。
标准化的种植模式,正为苹果采摘的智能化之路铺平道路。当我们把视线从黄土高原的苹果园,转向岭南地区的荔枝林时,一场更为复杂的技术挑战正在进行。

中国工程院院士 罗锡文:苹果相对来说比荔枝生长规律好一点。刚才这个荔枝在这个位置,这个荔枝在这个位置,每个水果的生长部位没有规律。
与苹果的单果采摘不同,荔枝采摘需要保持果穗完整。这对机器人的视觉识别和抓取系统提出了全新的挑战。

罗锡文:如果我是计算机,我的抉择是什么?我剪这个地方,把上面的树枝牺牲?方法是第一平台做高一点,第二手臂做长一点,第三增加手臂数量,多做几个“手”去采。
我国水果品种繁多,每种作物的生长特性都不同,采摘机器人的设计也需要针对性研究。记者调查了解到,我国科学家已在多种水果采摘机器人上取得技术进展,形成了丰富的果园机器人研发矩阵。
新疆大学农牧机器人与装备工程中心首席科学家 邹湘军:把水果的大数据放到机器人控制器里,只要遇到一种水果它就会识别。像葡萄和荔枝,我们可以就用同一台机器人去做。

从单一果园的试点,到全国主要水果产区的技术推广,我国的果园机器人正在走出一条符合产业需求的创新之路。虽然前路依然漫长,但这些扎实的技术积累,已经让越来越多的果园看到了智能化的希望。
在各类水果采摘机器人仍在努力突破技术瓶颈的同时,果园生产的另一个重要环节——植保,已经率先实现高度的机械化。

中国农业大学农业无人机系统研究院院长 何雄奎:植保机械化的水平,应该在70%到80%了,像北京地区达到了90%。
罗锡文:整个水果生产机械化里面,做得比较好一点是植保打药。
在北京市平谷区的一片标准化桃园里,搭载多光谱相机的空中植保机器人正在自主作业,人药分离保障高效、安全。

华南农业大学工程学院院长 李君:如果无人机没那么普及,植保也是很需要人工的,一年到头可能要打15到20次药。
在北京市昌平区的苹果园里,地面植保机器人,根据果树冠层大小自动调节施药量,农药用量大幅度节省。
国家农业智能装备工程技术研究中心副主任 吴建伟:打药机都是非常智能的。只要它一动,数据就上来,它就要打药了。通过图像的识别,直接进入监控体系。

为方便机器人作业,许多地方的果园开展了宜机化改造,山坡地被修整成梯田,过密的果树被间伐,为机器人入园扫清障碍。
李君:通过地形改造,先保证机器能够入园作业。在这基础上,再来谈有没有好用的农机。

随着农业数智化基础设施的改善,一支分工明确的果园机器人“军团”正在逐步形成:果园深处,机器狗搭载深度视觉传感器巡检果树长势;采摘现场,无人运输机器人沿轨道转运果实;分拣中心,分拣机器人通过光谱监测实现糖度、色泽精准分级。

李君:空中遥感无人机,来监测整个园区长势的情况。巡检机器人,通过机械狗来巡检,搭载多光谱、激光雷达装置,从地面也进行相关的监测,形成监测网络,这样就能够看到整个园区。
这些各司其职的智能化装备,未来都将在一个“智慧大脑”的统一指挥下协同作业。在国家农业智能装备工程技术研究中心的8个智慧果园里,这样的“智慧大脑”已投入使用。在指挥中心的大屏幕上,机器人的运行状态、作业进度、田间传感器数据实时更新,实现了从种植到销售的全链条数字化管理。
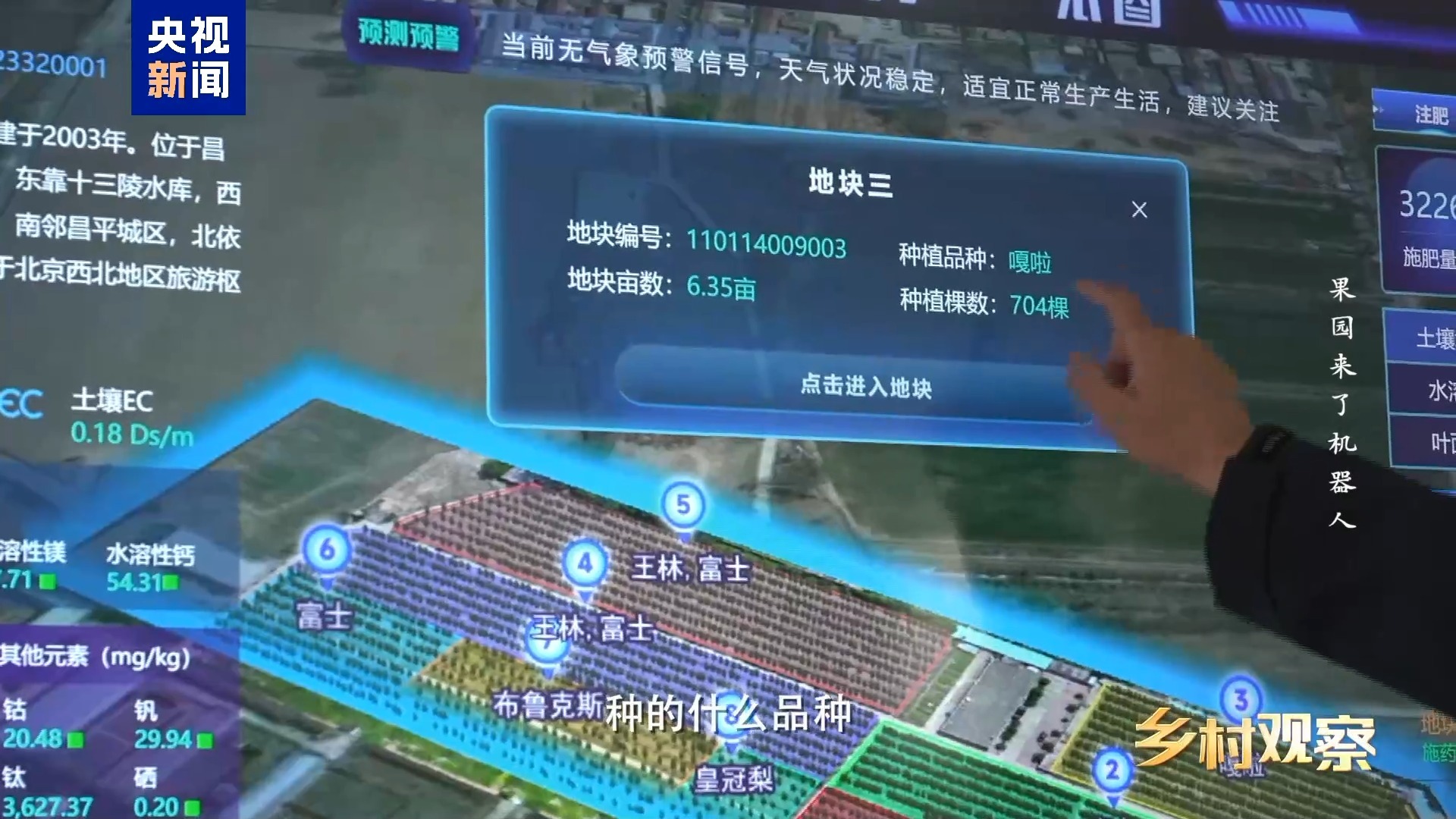
吴建伟:所有的数据已经精确到每棵果树了。种的什么品种、种了多少棵,都非常清晰。可以通过手机端进行操作,施肥机怎么操作、打药机怎么操作,点完以后,设备就动起来了,数据回到这一张图上。
近年来,以农业机器人为代表的农业数智化快速发展,离不开国家政策的大力支持。2025年8月发布的《国务院关于深入实施“人工智能+”行动的意见》提出,加快农业数智化转型升级。大力发展智能农机、农业无人机、农业机器人等智能装备。

2025年11月,农业农村部发布《智慧农业标准体系建设指南》,提出到2030年基本建成满足智慧农业发展需求、先进适用、开放融通的智慧农业标准体系。这为智慧果园的建设提供了全国统一的操作手册,标志着我国智慧农业发展进入新阶段。

罗锡文:现在我们正在规划,农业农村部和科技部联合,其中一个很重大的方向就是智能农机装备,把国内的发展趋势和国外的动态相结合,提出了一些发展方向。我想再过十年,希望能够有很多这样的机器出现。
在这场调查中,记者看到了中国果园正在经历深刻变革:从举步维艰的采摘机器人,到快速推广的植保机器人;从单打独斗到系统协作。虽然标准化改造仍需时日,但科技的力量正在为传统农业注入新的活力,为中国果园描绘出更加智慧的未来图景。
从肩挑背扛的传统农业,到机械臂起舞的智慧果园,一场深刻的生产革命正在田间地头真实上演。中国果业正通过自主创新探索发展新路,推动生产向技术密集与高效协同转变,以新质生产力破解产业瓶颈,实现质量和效益的跃升。
作者感言: